Intrinsic Shape Matching by Planned Landmark Sampling
Abstract
Recently, the problem of intrinsic shape matching has received a lot
of attention. A number of algorithms have been proposed, among which
random-sampling-based techniques have been particularly successful
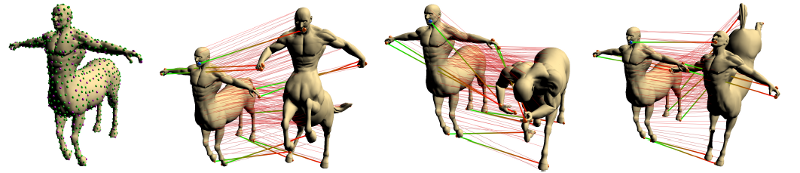
due to their generality and efficiency. We introduce a new
sampling-based shape matching algorithm that uses a planning step to
find optimized "landmark" points. These points are matched first
in order to maximize the information gained and thus minimize the
sampling costs. Our approach makes three main contributions: First,
the new technique leads to a significant improvement in performance,
which we demonstrate on a number of benchmark scenarios. Second, our
technique does not require any keypoint detection. This is often a
significant limitation for models that do not show sufficient surface features.
Third, we examine the actual numerical degrees of
freedom of the matching problem for a given piece of geometry. In
contrast to previous results, our estimates take into account unprecise geodesics
and potentially numerically unfavorable geometry of general
topology, giving a more realistic complexity estimate.
Keywords:
shape matching, registration, landmarks, ransac, entropy, plansac
 Paper [preprint version] (~20MB)
- 16182 mal angeklickt
Paper [preprint version] (~20MB)
- 16182 mal angeklickt
Bibliography
A. Tevs, A. Berner, M. Wand, I. Ihrke, H.-P. Seidel "Intrinsic Shape Matching by Planned Landmark Sampling" , Eurographics, 2011 [bibtex]